Como se ha mencionado en el artículo anterior (prueba de Hartmann) en este post describo el método que recientemente he comenzado a ser utilizado para probar la óptica durante el procesamiento y que se basa en la prueba de Hartmann.
En la fase del espejo parabolizzazione, en particular, es necesaria la última etapa del refinamiento de la forma de la superficie a conocer con precisión el perfil de error con el fin de intervenir con eficacia.
Para reconstruir este perfil se utiliza normalmente, al menos a nivel amateur, la prueba de Foucault con la máscara Couder, pero en mi experiencia personal nunca fue capaz de utilizar de manera óptima.
La mayor dificultad siempre he encontrado en la evaluación de lo que fue la posición longitudinal precisa del carro a la que la cuchilla generaría la mancha de color en las dos ventanas simétricas de la máscara. De hecho apenas podía determinar esta posición con un margen de incertidumbre entre diferentes mediciones dentro de 1-1,5 décimas de milímetro, quizá penalizado por la distancia desde la que tenía que evaluar la tonalidad (hacia 4 m, es decir, el radio de curvatura del espejo), combinado con el modesto tamaño de las ventanas necesarias para tener un número adecuado de puntos de medición.
Una sensibilidad en los tamaños 1-2 décimas de milímetro, sin embargo, no es suficiente para ser capaz de definir con precisión el perfil de la forma de la superficie, especialmente en la zona del borde y sobre todo cuando se empieza a alcanzar altos niveles de los valores lambda.
Para tientas para mejorar la lectura de las medidas que siempre he pensado que la mejor solución a sí mismos a utilizar una prueba de que era posible la menor subjetiva.
Entre las pruebas que he estimado que en la versión clásica de Hartmann me dio la inspiración para tientas en esta dirección. Esta prueba consiste en colocar una fuente de luz puntual en el centro de curvatura y una máscara perforada apropiadamente en la proximidad del espejo. La luz reflejada desde el espejo que pasa a través de los orificios de la máscara vuelve hacia el centro de curvatura en forma de pequeña haces de luz que si interceptado por una placa fotográfica o mediante un dispositivo de adquisición digital (desprovisto de la parte óptica) manifiesta como una serie de puntos de luz. Mediante el análisis de la posición de los puntos luminosos que puede ser capaz de determinar la forma de la superficie del espejo.
Hay muchas variaciones de esta prueba pero uno que pensó en utilizar, porque pensé que era el más fácil de implementar dos fotos, una salida en intrafocale y una toma en extrafocal.
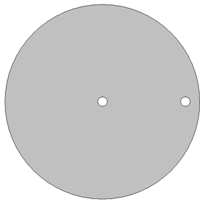
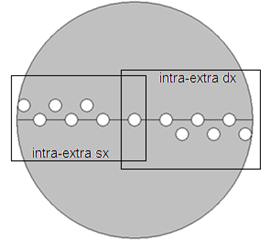
Para dar una idea del principio de funcionamiento de esta prueba es suficiente para pensar en una máscara para ser colocado en frente del espejo, como la realizada en la siguiente figura, o con un agujero en el centro y uno en una posición marginal.
Mediante la colocación de la posición intrafocale sensor de cámara web obtendrá una imagen con la ventana marginal de puntos en una posición más a la derecha con respecto al punto central de la ventana, mientras que posicionarse en extrafocal obtendrá una imagen en la que el punto de la ventana marginal estará en una posición más a la izquierda con respecto al punto central de la ventana.
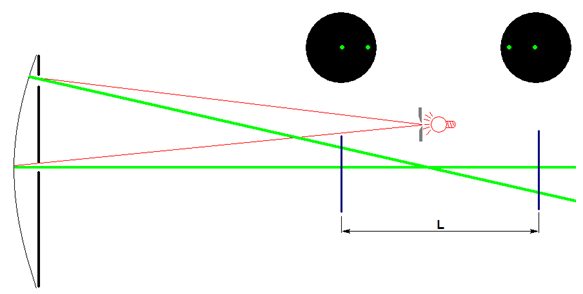
Evidentemente hay una posición en la que se superponen exactamente los dos puntos y esta posición indica el punto en el que el eje luz que vuelve del cono de la ventana marginal corta el eje óptico del espejo. Esta posición se puede encontrar fácilmente matemáticamente si tiene acceso a los siguientes datos:
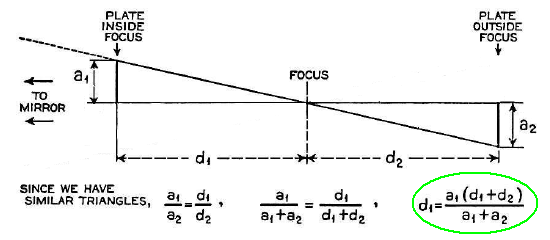
Por lo tanto, es necesario conocer la distancia en milímetros o píxeles marginal entre el punto brillante y el punto central brillante en las dos imágenes (a1 a2 ed) y la distancia longitudinal entre las dos fotos (o la cantidad d1 + d2).
Se puede pensar en repetir esta operación para una máscara con varios agujeros para cada uno de los cuales calcula la posición del haz de curvatura y por lo tanto la diferencia empate con respecto a la primera ventana a partir del centro para obtener los mismos datos que se obtienen con la prueba de Foucault, es decir, los proyectos de los valores de las distintas zonas y la distancia media desde el centro de las ventanas de la máscara.
Si está usando una máscara con orificios dispuestos en toda la superficie que va a ser capaz de analizar en una sola toma todo el espejo. Esta prueba, sin embargo, y muy sensibles a cualquier desalineación entre la fuente de luz puntual y la posición en la que se coloca el sensor de foto, y menos de no ser capaz de crear una puesta a punto del probador de manera que los dos haces son coincidentes casi siempre notar las diferencias entre los proyectos de valores de dos manchas simétricas con respecto al centro del espejo (mientras que debería ser idéntica si el espejo era perfectamente simetría axial).
Otro aspecto a considerar para mejorar la precisión de las mediciones es tomar fotos de posiciones adecuadamente distantes del centro de curvatura del espejo (y en cualquier caso fuera de los límites de la cáustica), pero esto implica la necesidad de tener a disposición de las cámaras o cámaras web con el tamaño del sensor muy grande.
Teniendo en cuenta estas limitaciones decidí realizar la prueba con una máscara con orificios dispuestos sólo a lo largo de un diámetro del espejo, o un poco más lejos de él, como se muestra en las dos figuras siguientes, para que pueda alinearse con la mayor dimensión del sensor de cámaras:
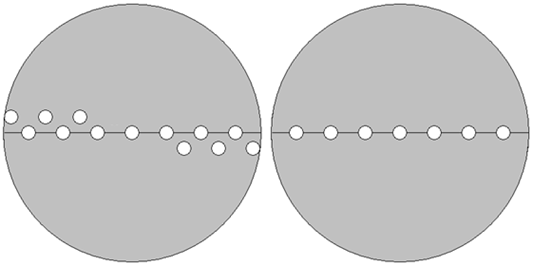
De este modo, con los orificios dispuestos de modo se puede minimizar el efecto negativo introducido por ligera desalineación entre los dos hacia el exterior y vigas o ligera inclinación del sensor de la cámara volver, va a mediar en los proyectos de valores de dos ventanas simétricas.
Desde la cámara web a mi disposición tenía un sensor de tamaño limitado que tenía que tomar dos imágenes para cada posición para poder cubrir toda el área bajo el punto brillante (asegurándose de incluir siempre el punto central brillante en fotos), muovendomi lateralmente con el carro del probador, moverse 4 serie de imágenes: Intra-derecha, intra-izquierda, Extra-extra-derecha e izquierda.
Una vez que, por tanto, serán necesarias las imágenes obtenidas para determinar el centro de cada punto brillante y calcular la distancia de cada uno de ellos con respecto a la mancha central. Esta operación se puede realizar la evaluación de los ojos manualmente al centro de la mancha, lo que es probable que introduzca una dosis de subjetividad a la prueba de que era mi intención desde el principio para evitar. Por esta razón he implementado un simple código en Visual Basic (porque no son capaces de encontrar cualquier software dedicado), para que me ayude en este, que calcula el centro de gravedad entre todos los píxeles brillantes que conforman cada una sola mancha. Además de mejorar la calidad del resultado final adquiero al menos treinta imágenes para cada posición, que el software especial analizará la mediación de todos los resultados individuales.
Una vez analizadas todas las imágenes del software se abre automáticamente una hoja de cálculo de Excel preprocesado en el que se adapta a todos los datos necesarios para determinar el perfil de la superficie del espejo.
Aunque el proceso parece laboriosa y larga en realidad le permite tomar la prueba y reducir todo en un corto período de tiempo, o en línea con el tiempo requerido para realizar una sola Foucault prueba, pero con la ventaja de haber llevado a cabo una medida que ya es el promedio de bien 30 o más imágenes diferentes, y parece ser el menos subjetivo posible.
En principio,, después de alinear el probador con el haz de luz, la cámara web montado y conectado a la PC (es decir, más o menos el mismo tiempo para configurar el probador de la prueba de Foucault), Necesitan un par de minutos para adquirir todas las fotos necesarias y 4-5 minutos para reducir todos los datos.
Para dar un ejemplo práctico aquí hay algunos ejemplos de fotos que he adquirido durante unas pruebas:
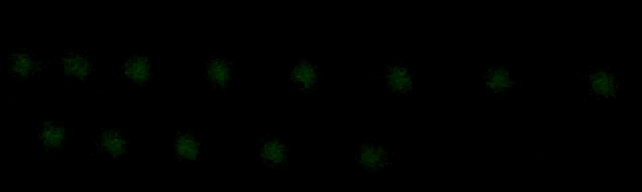
Como se mencionó anteriormente, debido al reducido tamaño del sensor a mi disposición que tenía que adquirir 2 imágenes para cada posición para poder cubrir todas las manchas luminosas awfull lateralmente con el carro del probador.
Intrafocale derecha:
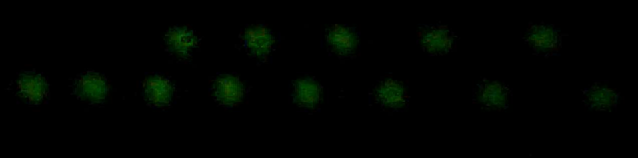
izquierda Intrafocale:
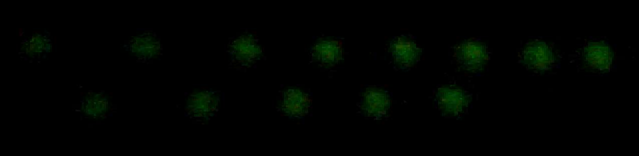
extrafocal derecha:
izquierda extrafocal:
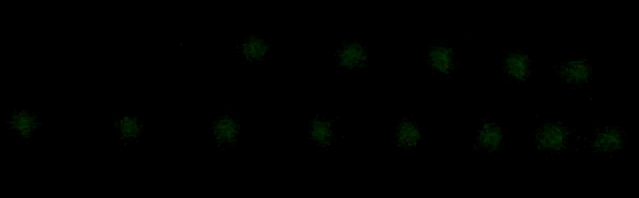
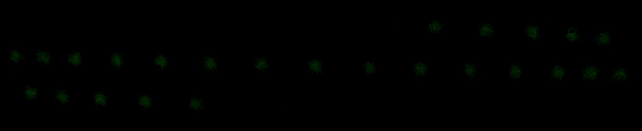
Si tuviera acceso a un sensor más grande, Podría adquirir directamente dos imágenes como éstas sin tener que mover lateralmente el sensor de reanudar todos los puntos luminosos:
Intrafocale:

Extrafocale:
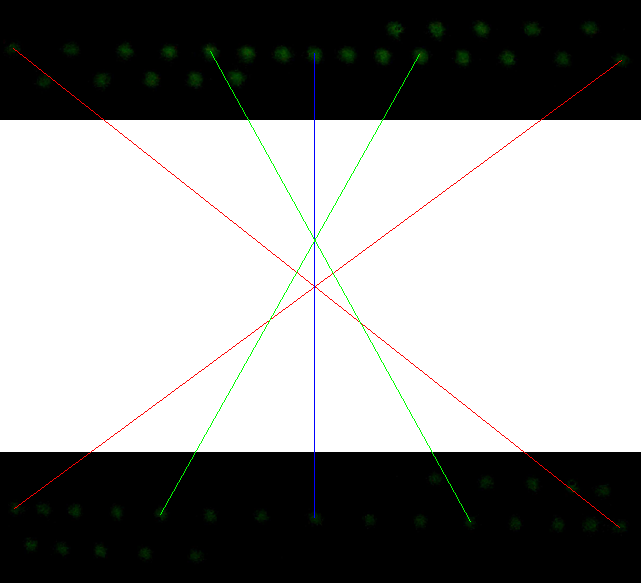
De nuevo por debajo del principio de que se aprovecha de esta forma de analizar la superficie del espejo, uso 2 imágenes reales que tal vez le ayudarán a entender mejor que nunca. La línea azul que conecta los puntos centrales de las dos imágenes es el eje óptico del espejo, mientras que las líneas rojas y líneas verdes en lugar representar a los que tendría los caminos de cada punto brillante pasando de su posición en la posición respectiva en extrafocal intrafocale. Como se puede ver las líneas verdes se cortan en un punto diferente de las líneas rojas y esto es debido a la diferente radio de curvatura del espejo bajo las diferentes ventanas de la máscara.
Comparando entre ellos todas las posiciones de los centros de curvatura, Se pueden calcular las detracciones de todas las zonas, reduciendo sustancialmente los datos tal y como lo haría con la prueba de Foucault.
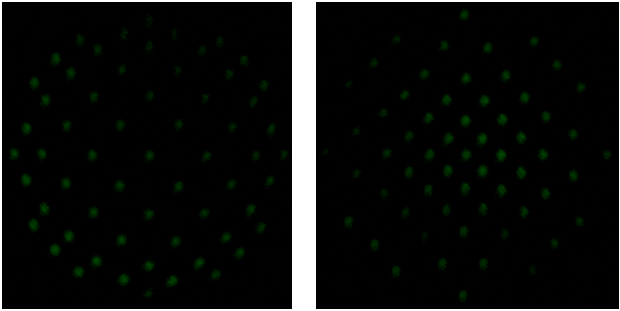
En el caso de un sensor aún más grande que pude adquirir estas imágenes de tipo que cubren toda la superficie del espejo, como se esperaba en la prueba de Hartmann reales.
Debido al pequeño tamaño del sensor a mi disposición, cada uno de estos he podido obtenido solamente por encolado juntos 4 diferentes imágenes. Incluso con un sensor modesta es posible interceptar todos los puntos luminosos, acaba de estar más cerca del centro de curvatura del espejo, donde los rayos tienden a converger más y más. Sin embargo cuanto más se acerque al punto de fuego,,, también los puntos brillantes son cerca de partida entre sí para fusionar la prevención de la identificación de bien dónde termina una y donde empieza el otro. Para ello, es necesario mover lo suficientemente lejos del centro de curvatura del espejo de tal manera que los puntos son más nítidas, aislado y distante como sea posible.
En la última sesión de parabolizzazione hice Siempre he utilizado este método para probar el procesamiento de espejo que no tiene manera de apreciar la calidad. Además pude usar una máscara 12 ventanas en el radio, Lo impensable que ver con la prueba de Foucault y la máscara de Couder, que de otra manera generar demasiado pequeñas ventanas cerca del borde.
Una de las cualidades tenía la intención de tratar y he llegado a nuestra atención durante las diferentes sesiones de medición fue la verificación de la capacidad de repetición entre las mediciones sucesivas.
Así que aquí hay algunos ejemplos de estas pruebas:
Ejemplo 1:
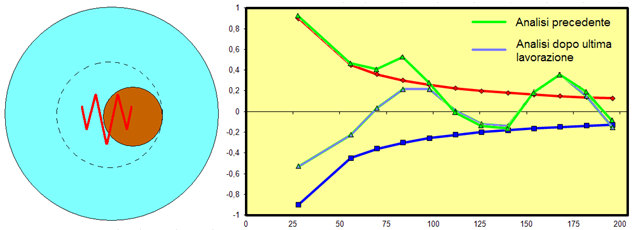
En las figuras siguientes llevar a un paso de una planta de procesamiento donde, después de haber llevado a cabo una medición del perfil de espejo, Me decidí a intervenir con el fin de reducir la zona central del espejo va a llevar a cabo una sesión de trabajo con la herramienta corta sub-diámetro con paseos W dentro de una circunferencia 100 mm de radio, y después realizar otra medición. No se le puso a trabajar en zonas con un radio superior a 100 mm que esperaba que la forma de la superficie en esas áreas no cambió, y de hecho, es muy claro que no hay una muy buena correspondencia entre los valores antes y después del procesamiento.
Ejemplo 2:
Sin embargo, estos son los otros valores 2 pruebas de larga distancia de prueba en un solo día. Es clara la correspondencia entre los valores de los dos conjuntos de datos que tienen una desviación máxima más pequeña de una décima de milímetro y un promedio de aproximadamente media décima de milímetro.

En conclusión, la viabilidad de esta prueba, al menos a nivel amateur, Está fuertemente influenciado por ser capaz de encontrar el software que reducen los datos de forma rápida, de lo contrario el tiempo para la obtención de los resultados sería demasiado largo y cuentas muy laborioso no que su uso sea accesible.
Para utilizar esta prueba que tenía que poner en práctica un pequeño código en Visual Basic porque la red no fue capaz de encontrar ninguna que se adaptaba a mi caso (PD: Yo no tenía conocimiento de la programación cuando empecé a pensar en este tipo de pruebas, pero con un viejo libro de la escuela y un poco de tiempo para el estudio pude poner en práctica algo útil).
Si alguien quiere probar este tipo de prueba, y necesitaba este pequeño programa para la reducción de datos se puede encontrar en el siguiente enlace en forma de archivos comprimidos RAR. Además del pequeño programa también es un archivo de Word con instrucciones de uso :
prueba de Hartmann de Mirco
Aunque sería incluso más bienvenido si alguien con habilidades en la programación que deseen participar en 'proceso de un pequeño programa (sin duda mejor y más eficaz de mi) eso sería única, no sólo a nivel nacional.
Para completar la información, es posible realizar esta prueba también a través de una única imagen tomada arbitrariamente o de intrafocale o extrafocal.
El principio, sin embargo, no cambia como se puede pensar en la propia máscara (colocado delante del espejo) como uno de los dos cuadros necesarios. En este caso, sin embargo,, para la reducción de datos, Es necesario conocer con precisión la distancia entre el sensor y el espejo y el tamaño en micras de los píxeles de que el sensor sea capaz de convertir en mm la distancia entre los puntos luminosos (Se ve que la distancia entre las ventanas de la máscara se expresa generalmente en mm).
El software de reducción de datos para este tipo de medidor de puesta a punto se llama Hart1d. Por desgracia, el enlace que yo era capaz de encontrar que se refiere a la página donde se puede descargar en este momento ya no está activo, pero buscando en la red se puede encontrar de todas formas. Si el enlace voy a volver a puesto activo de nuevo en el artículo.
LonRobie
LonRobie
Giulio Tiberini
arpafab
Bartolomei Mirco
Alberto Bugoloni
Bartolomei Mirco
Bartolomei Mirco
Alberto Bugoloni